Preliminaries
- Gaussian distribution
- log-likelihood
- Calculus
- partial derivative
- Lagrange multiplier
EM Algorithm for Gaussian Mixture1
Analysis
Maximizing likelihood could not be used in the Gaussian mixture model directly, because of its severe defects which we have come across at ‘Maximum Likelihood of Gaussian Mixtures’. With the inspiration of K-means, a two-step algorithm was developed.
The objective function is the log-likelihood function:
\[ \begin{aligned} \ln \Pr(\mathbf{x}|\mathbf{\pi},\mathbf{\mu},\Sigma)&=\ln (\Pi_{n=1}^N\sum_{j=1}^{K}\pi_k\mathcal{N}(\mathbf{x}|\mathbf{\mu}_k,\Sigma_k))\\ &=\sum_{n=1}^{N}\ln \sum_{j=1}^{K}\pi_j\mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_j,\Sigma_j)\\ \end{aligned}\tag{1} \]
\(\mu_k\)
The condition that must be satisfied at a maximum of log-likelihood is the derivative(partial derivative) of parameters are \(0\). So we should calculate the partial derivatives of \(\mu_k\):
\[ \begin{aligned} \frac{\partial \ln \Pr(X|\pi,\mu,\Sigma)}{\partial \mu_k}&=\sum_{n=1}^N\frac{-\pi_k \mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_k,\Sigma_k)\Sigma_k^{-1}(\mathbf{x}_n-\mathbf{\mu}_k)}{\sum_{j=1}^{K}\pi_j\mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_j,\Sigma_j)}\\ &=-\sum_{n=1}^N\frac{\pi_k \mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_k,\Sigma_k)}{\sum_{j=1}^{K}\pi_j\mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_j,\Sigma_j)}\Sigma_k^{-1}(\mathbf{x}_n-\mathbf{\mu}_k) \end{aligned}\tag{2} \]
and then set equation (2) equal to 0 and rearrange it as:
\[ \begin{aligned} \sum_{n=1}^N\frac{\pi_k \mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_k,\Sigma_k)}{\sum_{j=1}^{K}\pi_j\mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_j,\Sigma_j)}\mathbf{x}_n&=\sum_{n=1}^N\frac{\pi_k \mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_k,\Sigma_k)}{\sum_{j=1}^{K}\pi_j\mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_j,\Sigma_j)}\mathbf{\mu}_k \end{aligned}\tag{3} \]
In the post ‘Mixtures of Gaussians’, we had defined:
\[ \gamma_{nk}=\Pr(k=1|\mathbf{x}_n)=\frac{\pi_k \mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_k,\Sigma_k)}{\sum_{j=1}^{K}\pi_j\mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_j,\Sigma_j)}\tag{4} \] as responsibility. And substitute equation(4) into equation(3):
\[ \begin{aligned} \sum_{n=1}^N\gamma_{nk}\mathbf{x}_n&=\sum_{n=1}^N\gamma_{nk}\mathbf{\mu}_k\\ \sum_{n=1}^N\gamma_{nk}\mathbf{x}_n&=\mathbf{\mu}_k\sum_{n=1}^N\gamma_{nk}\\ {\mu}_k&=\frac{\sum_{n=1}^N\gamma_{nk}\mathbf{x}_n}{\sum_{n=1}^N\gamma_{nk}} \end{aligned}\tag{5} \]
and to simplify equation (5) we define:
\[ N_k = \sum_{n=1}^N\gamma_{nk}\tag{6} \]
Then the equation (5) can be simplified as:
\[ {\mu}_k=\frac{1}{N_k}\sum_{n=1}^N\gamma_{nk}\mathbf{x}_n\tag{7} \]
\(\Sigma_k\)
The same calcualtion would be done to \(\frac{\partial \ln \Pr(X|\pi,\mu,\Sigma)}{\partial \Sigma_k}=0\) :
\[ \Sigma_k = \frac{1}{N_k}\sum_{n=1}^N\gamma_{nk}(\mathbf{x}_n - \mathbf{\mu_k})(\mathbf{x}_n - \mathbf{\mu_k})^T\tag{8} \]
\(\pi_k\)
However, the situation of \(\pi_k\) is a little complex, for it has a constrain:
\[ \sum_k^K \pi_k = 1 \tag{9} \]
then Lagrange multiplier is employed and the objective function is:
\[ \ln \Pr(X|\mathbf{\pi},\mathbf{\mu},\Sigma)+\lambda (\sum_k^K \pi_k-1)\tag{10} \]
and set the partial derivative of equation (10) to \(\pi_k\) to 0:
\[ 0 = \sum_{n=1}^N\frac{\mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_k,\Sigma_k)}{\sum_{j=1}^{K}\pi_j\mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_j,\Sigma_j)}+\lambda\tag{11} \]
And multiply both sides by \(\pi_k\) and sum over \(k\):
\[ \begin{aligned} 0 &= \sum_{k=1}^K(\sum_{n=1}^N\frac{\pi_k\mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_k,\Sigma_k)}{\sum_{j=1}^{K}\pi_j\mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_j,\Sigma_j)}+\lambda\pi_k)\\ 0&=\sum_{k=1}^K\sum_{n=1}^N\frac{\pi_k\mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_k,\Sigma_k)}{\sum_{j=1}^{K}\pi_j\mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_j,\Sigma_j)}+\sum_{k=1}^K\lambda\pi_k\\ 0&=\sum_{n=1}^N\sum_{k=1}^K\gamma_{nk}+\lambda\sum_{k=1}^K\pi_k\\ \lambda &= -N \end{aligned}\tag{12} \]
the last step of equation(12) is because \(\sum_{k=1}^K\pi_k=1\) and \(\sum_{k=1}^K\gamma_{nk}=1\)
Then we substitute equation(12) into eqa(11): \[ \begin{aligned} 0 &= \sum_{n=1}^N\frac{\mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_k,\Sigma_k)}{\sum_{j=1}^{K}\pi_j\mathcal{N}(\mathbf{x}_n|\mathbf{\mu}_j,\Sigma_j)}-N\\ N &= \frac{1}{\pi_k}\sum_{n=1}^N\gamma_{nk}\\ \pi_k&=\frac{N_k}{N} \end{aligned}\tag{13} \]
the last step of equation (13) is because of the definition of equation (6).
Algorithm
Equations (5), (8), and (13) could not construct a closed-form solution. The reason is that for example in equation (5), both side of the equation contains parameter \(\mu_k\).
However, the equations suggest an iterative scheme for finding a solution which includes two-step: expectation and maximization:
- E step: calculating the posterior probability of equation (4) with the current parameter
- M step: update parameters by equations (5), (8), and (13)
The initial value of the parameters could be randomly selected. But some other tricks are always used, such as K-means. And the stop conditions can be one of:
- increase of log-likelihood falls below some threshold
- change of parameters less than some threshold.
Python Code for EM
The input data should be normalized as what we did in ‘K-means algorithm’
def Gaussian( x, u, variance):
k = len(x)
return np.power(2*np.pi, -k/2.)*np.power(np.linalg.det(variance),
-1/2)*np.exp(-0.5*(x-u).dot(np.linalg.inv(variance)).dot((x-u).transpose()))
class EM():
def mixed_Gaussian(self,x,pi,u,covariance):
res = 0
for i in range(len(pi)):
res += pi[i]*Gaussian(x,u[i],covariance[i])
return res
def clusturing(self, x, d, initial_method='K_Means'):
data_dimension = x.shape[1]
data_size = x.shape[0]
if initial_method == 'K_Means':
km = k_means.K_Means()
# k_means initial mean vector, each row is a mean vector's transpose
centers, cluster_for_each_point = km.clusturing(x, d)
# initial latent variable pi
pi = np.ones(d)/d
# initial covariance
covariance = np.zeros((d,data_dimension,data_dimension))
for i in range(d):
covariance[i] = np.identity(data_dimension)/10.0
# calculate responsibility
responsibility = np.zeros((data_size,d))
log_likelihood = 0
log_likelihood_last_time = 0
for dummy in range(1,1000):
log_likelihood_last_time = log_likelihood
# E step:
# points in each class
k_class_dict = {i: [] for i in range(d)}
for i in range(data_size):
responsibility_numerator = np.zeros(d)
responsibility_denominator = 0
for j in range(d):
responsibility_numerator[j] = pi[j]*Gaussian(x[i],centers[j],covariance[j])
responsibility_denominator += responsibility_numerator[j]
for j in range(d):
responsibility[i][j] = responsibility_numerator[j]/responsibility_denominator
# M step:
N_k = np.zeros(d)
for j in range(d):
for i in range(data_size):
N_k[j] += responsibility[i][j]
for i in range(d):
# calculate mean
# sum of responsibility multiply x
sum_r_x = 0
for j in range(data_size):
sum_r_x += responsibility[j][i]*x[j]
if N_k[i] != 0:
centers[i] = 1/N_k[i]*sum_r_x
# covariance
# sum of responsibility multiply variance
sum_r_v = np.zeros((data_dimension,data_dimension))
for j in range(data_size):
temp = (x[j]-centers[i]).reshape(1,-1)
temp_T = (x[j]-centers[i]).reshape(-1,1)
sum_r_v += responsibility[j][i]*(temp_T.dot(temp))
if N_k[i] != 0:
covariance[i] = 1 / N_k[i] * sum_r_v
# latent pi
pi[i] = N_k[i]/data_size
log_likelihood = 0
for i in range(data_size):
log_likelihood += np.log(self.mixed_Gaussian(x[i], pi, centers, covariance))
if np.abs(log_likelihood - log_likelihood_last_time)<0.001:
break
print(log_likelihood_last_time)
return pi,centers,covarianceThe entire project can be found https://github.com/Tony-Tan/ML and please star me.
The progress of EM(initial with K-means):
and the final result is:
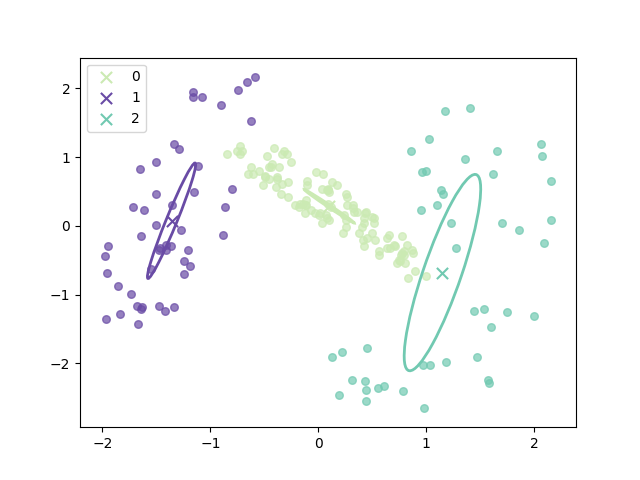
where the ellipse represents the covariance matrix and the axes of the ellipse are in the direction of eigenvectors of the covariance matrix, and their length is corresponding eigenvalues.
References
Bishop, Christopher M. Pattern recognition and machine learning. springer, 2006.↩︎